

IEEE Spectrum – October 2006 was the first time anyone had steered an object wirelessly through the blood vessel of a living creature. Microrobots would be able to travel deep inside the body, cruising our tiniest blood vessels to places that catheters can’t go and performing tasks that would be impossible without invasive procedures.
A team at École Polytechnique de Montréal has made enormous progress on the problem. They have designed magnetic drug carriers as small as 50 micrometers that they can steer, like the metal bead inside the pig, through large arteries and arterioles using an MRI machine. To reach tumors deeper in the body, they need robots too small to be powered by technology. And so they have turned to nature, harnessing swarms of swimming bacteria to serve as drug mules.
The closest engineers had come to realizing Feynman’s challenge was a diagnostic device called the PillCam. Introduced by the Israeli company Given Imaging in 2001, the disposable plastic capsule is about the size of a single piece of Good & Plenty candy and can be swallowed with water. It contains a light, a camera, batteries, an antenna, and a radio transmitter. As it passes through the gastrointestinal tract, it beams pictures wirelessly to a recording belt worn around a patient’s waist. The images are then analyzed for signs of cancers, Crohn’s disease, and other disorders. The procedure is less invasive than a traditional endoscopy and more sensitive than X-ray imaging.
But while the PillCam is great at inspecting the large, easily accessible cavities of the digestive system, it’s much too big to travel elsewhere in the body. The device is also passive. A true medical microbot must propel and steer itself through an intricate network of fluid-filled tubes to tissues deep inside the body. And because it is so small, it must do so without the convenience of a battery-powered motor.
You might think that an obvious way to accomplish this task is to equip the robot with metallic particles and guide it with a magnet from outside the body. You wouldn’t be entirely wrong. Indeed, some magnet-tipped surgical catheters work in this way. But a permanent magnet poses several problems for a smaller, tetherless robot. For instance, the magnet must be positioned quite close to the tiny particles to exert enough force to attract them. The robot could operate only near the skin and in one direction—toward the magnet. It would also be difficult to control. As it moved toward the magnet, the pull would increase, accelerating the robot and making it impossible to redirect if it went astray. And how would you know where it was going, anyway?
To make a real medical microbot, we started with iron cobalt nanoparticles, which are more sensitive to magnetic forces than other nontoxic metal alloys. We coated the nanoparticles in graphite to keep them from oxidizing, and then we encased them, along with molecules of the cancer drug doxorubicin, in a biodegradable polymer sac.
We can scale these robots down to a few hundred micrometers; our gradient coils aren’t powerful enough to get a grip on anything smaller than that. With beefier, custom-built coils, we reduced the size to about 50 µm. But that’s the limit: Propelling even tinier robots would require gradients so strong that the huge jolt of current needed to quickly fire up the coils would begin to disturb cells in the body’s central nervous system.
In 2011, we tested the ability of these microcarriers to deliver drugs in rabbits. We injected a small squad into the hepatic artery, which supplies blood to the liver and other nearby organs. As in the pig experiment, we had already plotted a simple navigation course using an MRI scan of the rabbit’s interior. Our computer program then steered the robots toward their target by automatically adjusting the gradient field. We waited a few seconds, then took another scan. A distinguishable black smudge in one lobe of the liver proved that the tiny soldiers had shot through the artery, made a sharp turn at a bifurcation, and then congregated at the last waypoint. As their polymer shells degraded, they released their medicinal weapons, although in this experiment, there was no tumor to kill.
Microcarriers may be ideal for targeting liver cancers in humans because the vessel branches that lead to the liver’s lobes are quite large—about 150 µm or wider. But to reach tumors hidden behind networks of smaller capillaries, such as in the breast or the colon, we need microbots no thicker than a couple of micrometers. And because the gradient coils of an MRI machine can’t be made powerful enough to propel them, they must propel themselves.
We don’t have to invent these dream machines—they already exist in nature.
The MC-1 bacterium was first discovered in 1993 in a small, salty estuary of the Pettaquamscutt River in Rhode Island. The strain, which is now cultivated in laboratories, is the model microbot. It has a spherical body about 2 µm across, which provides ample surface area for attaching molecules of anticancer drugs. It also has a pair of spinning, whiplike tails powered by molecular “rotary motors” that rocket it through water at speeds up to 150 times its body length per second. (If Olympian Michael Phelps could do that, he would swim faster than the cruising speed of a Boeing 747.)
Most important, MC-1 is magnetic. The species belongs to a group of bacteria described as magnetotactic because they have the special skill of aligning themselves with Earth’s magnetic field. Though it’s unclear what advantage this gives them, they perform the trick with a chain of iron oxide nanocrystals called magnetosomes that behave like a compass needle.
To guide the bacteria, we need generate only a very weak magnetic field—just slightly stronger than Earth’s—pointed toward a target such as a tumor. The goal here is to direct the compass needle (the magnetosomes), not to propel the entire compass (the organism). We do this with specially designed electromagnetic coils that, in addition to being less powerful than an MRI machine, allow us to orient the field by varying the amount of current passing through each coil. The bacteria then swim toward the artificial “north” pole, navigating the twists and turns of the vascular network as if they were reeds in a river. In the hot blood of a mammalian body, the microbes survive only about 40 minutes.
We have demonstrated the potential of this system in mice. After injecting a swarm of bacteria in each animal’s tail, we fixed an artificial pole on one of two tumors in the body. When we dissected and examined the tumors, we found more bacteria in the targeted tumor than in the other. But the results weren’t ideal. In fact, most of the swarm never made it to a tumor at all. Many cells got swept away by heavy currents in the large vessels of the tail before they could reach the calmer capillaries.
I offer two solutions to this problem. First, swarms of MC-1 bacteria could be used specifically to treat colorectal cancers. Because the colon is easily accessed through the rectum with a catheter, the bacteria can be injected close to the tumor and so will be more likely to find it. We are now planning trials in monkeys to test whether the procedure will be safe for humans.
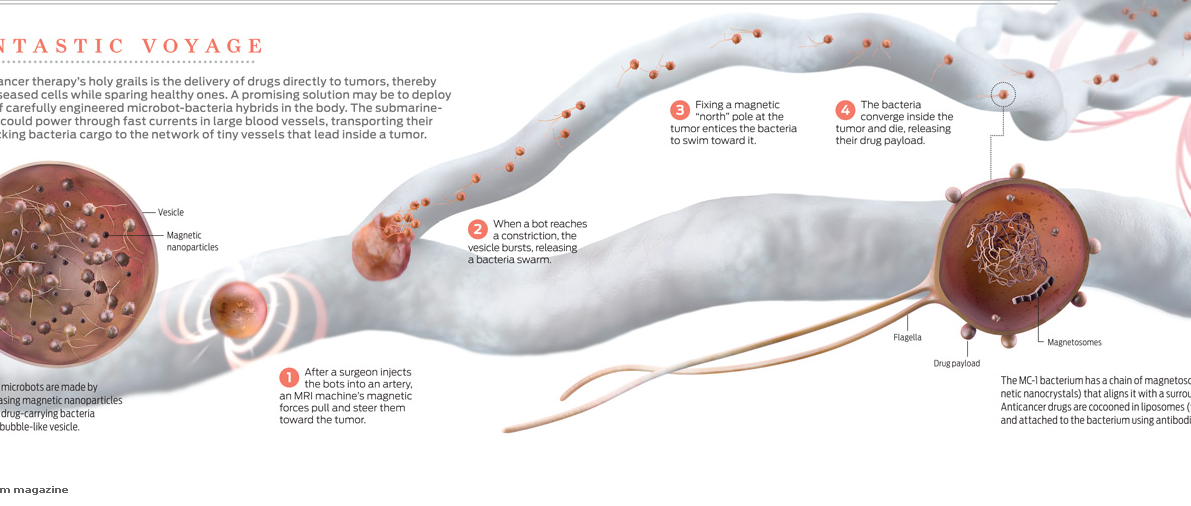
The second solution we are pursuing is a microcarrier-bacteria hybrid [see illustration, “Fantastic Voyage”]. We make these robots by loading fat-like bubbles, such as vesicles or micelles, with magnetic nanoparticles and drug-packing bacteria. When deployed in the body, they could be navigated using an MRI machine through large blood vessels, similarly to microcarriers, until narrower vessels block their path. At this point, the bubbles—which could be engineered to burst upon smacking into a vessel wall—would dispatch the bacteria. Then the patient would be transferred from the MRI machine into our custom coils. Guided by the coils’ magnetic field, the armed microbes would swim to the tumor. And there they would die, releasing their drug cargo.
It will be several years before medical microbots of any form will be used in patients. There are still many unanswered questions. How many robots are needed to deliver enough drugs to kill a tumor? What amount of bacteria is safe to inject in humans? Will the body raise antibodies against them?
If you liked this article, please give it a quick review on ycombinator or StumbleUpon. Thanks

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.
