

New Scientist – Called a medusoid, after the umbrella-shaped class of jellyfish it mimics, the silicone cyborg uses heart muscle cells from a rat to recreate the pumping motion of the moon jellyfish, Aurelia aurita. When video of the medusoid is shown alongside that of the real thing, the similarity is startling.
They have tissue engineered (and intergrated it with other engineering) a soft robot cyborg that simulates a living creature.
Nature Biotechnology – A tissue-engineered jellyfish with biomimetic propulsion
Reverse engineering of biological form and function requires hierarchical design over several orders of space and time. Recent advances in the mechanistic understanding of biosynthetic compound materials computer-aided design approaches in molecular synthetic biology and traditional soft robotics and increasing aptitude in generating structural and chemical microenvironments that promote cellular self-organization have enhanced the ability to recapitulate such hierarchical architecture in engineered biological systems. Here we combined these capabilities in a systematic design strategy to reverse engineer a muscular pump. We report the construction of a freely swimming jellyfish from chemically dissociated rat tissue and silicone polymer as a proof of concept. The constructs, termed ‘medusoids’, were designed with computer simulations and experiments to match key determinants of jellyfish propulsion and feeding performance by quantitatively mimicking structural design, stroke kinematics and animal-fluid interactions. The combination of the engineering design algorithm with quantitative benchmarks of physiological performance suggests that our strategy is broadly applicable to reverse engineering of muscular organs or simple life forms that pump to survive.

Jellyfish-inspired Medusoid muscle and body design. a, Muscle architecture in juvenile jellyfish showing radial and circular fiber orientations. Note: Composite image generated from single stained lobe copied and rotated to eight positions around central axis to extrapolate musculature of “entire” animal. White: F-actin stain. b, Biomimetic Medusoid muscle layout based on late-stage ephyrae. c, Final optimized Medusoid body and muscle layout with radial and circular fiber orientations. d, Suboptimal Medusoid design promoting inefficient fluid interactions (“sieve design”). e, Close-up on junction of radial and circular muscle in jellyfish. f, Close-up on junction of radial and circular muscle in Medusoid. Note: This tissue was micropatterned using 20 μm wide lines spaced by 20 μm to emphasize longitudinal edges and improve pattern visibility. Final constructs were patterned with 22 μm wide lines separated by 4 μm gaps resulting in confluent anisotropic tissue (Fig. 1f).

Optical mapping confirms continuous action potential propagation in Medusoid and Jellyfish striated muscle. a, Set-up of optical mapping system (OMS) for membrane voltage recording in jellyfish muscle stained with RH237. b, Close-up on jellyfish lobe with typical field of view (FOV) on RH237-stained radial muscle. c, FOV overlaid with LED recording array. The two labeled channels are representative for channels recording from muscle tissue (channel 1, blue) or from mesoglea (channel 2, red). d, Recording traces from the two channels marked in (c) illustrate that only muscle recordings contain voltage signals. e, Filtered data set only contains channels recording from muscle.

Medusoid fabrication process. a, Titanium casting molds and PDMS micropatterned stamps fabricated from photolithographed silicon wafers provided templates for Medusoid body shape and muscle layout, respectively. b, Medusoid substrates were fabricated by spin-coating the titanium casting mold with PIPAAm for temperature-sensitive adhesion to a PDMS top layer. Using PDMS stamps the PDMS layer was micropatterned with fibronectin to elicit cell adhesion and the formation of anisotropic Medusoid muscle tissue. c, Substrates were seeded with a suspension of freshly isolated neonatal rat cardiomyocytes. d, Medusoid substrates were cultured for four days to allow for maturation of the 2D myocardium. e, Lowering bath temperatures below 35ºC dissolved the layer of PIPAAm, allowing to gently peel off the Medusoid from the titanium mold. f, The free-floating Medusoid was assayed for bell contraction and fluid transfer mimicking jellyfish feeding and swimming.
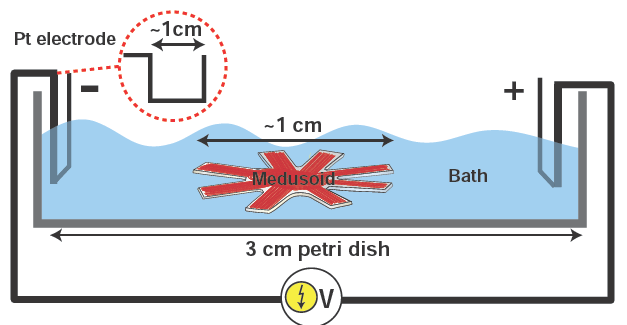
Experimental set-up for field stimulation of Medusoid constructs. An external field stimulator (Myopacer, IonOptix Corp.) generates monophasic square pulses (5-10 V, 10 ms duration, maximal current 65 mA) delivered to the bath (~10 ml Tyrode’s solution at 37°C) by two U-shaped platinum electrodes flanking the construct. Pacing frequency ranged from 0.5 to 2 Hz.

Key concepts of fluid transport in jellyfish and in vitro implementation
9 pages of supporting information If you liked this article, please give it a quick review on ycombinator or StumbleUpon. Thanks

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.