

This project involves the manipulation and the assembly of micro-objects using an optically controlled bubble microrobot. This allows light patterns to control the movement of the microrobot. Objectives include the micro-assembly of objects, including live cells, and the parallel, independent control of multiple microrobots in one system.
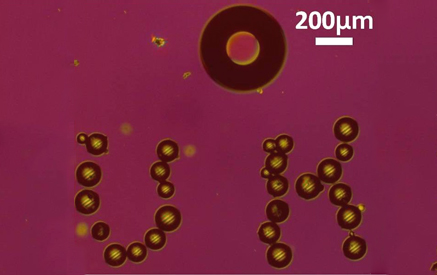
The UH microrobot (visible in the top center of the image) was used to position these 100-µm-diameter glass beads to form “UH”.
To get the bubble robots to move around in this saline solution, a 400 mW 980nm (that’s infrared) laser is shone through the bubble onto the heat-absorbing surface of the working area. The fluid that the bubbles are in tries to move from the hot area where the laser is pointing towards the colder side of the bubble, and this fluid flow pushes the bubble towards the hot area. Moving the laser to different sides of the bubble gives you complete 360 degree steering, and since the velocity of the bubble is proportional to the intensity of the laser, you can go as slow as you want or as fast as about 4 mm/s.
This level of control allows for very fine manipulation of small objects.
esides being able to create as many robots as you want of differing sizes out of absolutely nothing (robot construction just involves a fine-tipped syringe full of air), the laser-controlled bubbles have another big advantage over more common microbots in that it’s possible to control many different bubbles independently using separate lasers or light patterns from a digital projector. With magnetically steered microbots, they all like to go wherever the magnetic field points them as one big herd, but the bubbles don’t have that problem, since each just needs its own independent spot of light to follow around.
The researchers are currently investigating how to use teams of tiny bubbles to cooperatively transport and assemble microbeads into complex shapes, and they hope to eventually develop a system that can provide real-time autonomous control based on visual feedback. Eventually, it may be possible to conjure swarms of microscopic bubble robots out of nothing, set them to work building microstructures with an array of thermal lasers, and then when they’re finished, give each one a little pop to wipe it completely out of existence without any mess or fuss.
If you liked this article, please give it a quick review on ycombinator or StumbleUpon. Thanks

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.