
Scientia Sinica Physica – Graphene control cutting using an atomic force microscope based nanorobot
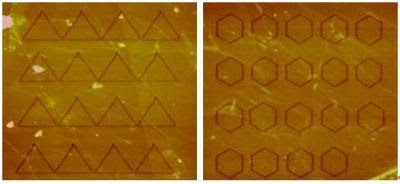
The electrical properties of graphene strongly rely on its size,geometry and edge structure.Therefore,the ability of fabricating graphene into desired configuration is one of the enabled techniques to manufacture graphene-based nanodevices and push it into practical applications.However,there is no effective way to achieve this goal till today. In this paper,an Atomic Force Microscopy(AFM)based mechanical cutting method is developed to meet the urgent need of graphene fabrication. Theoretical analysis between cutting force and lattice cutting angle is carried out,which reveals that the value of the cutting force is related with the graphene cutting direction.Different graphene shapes are fabricated to demonstrate the efficiency and effectiveness of the proposed method. Furthermore,after many times of cutting experiments with the rotation sample method, we proved that the cutting forces do vary with the lattice cutting direction.The experimental results keep consistent with the theoretical analysis.This discovery makes it possible to build a close-loop fabrication method with real-time force as sensor feedback.It also lays the foundation of theory and experiments on controllable graphene cutting with lattice precision.Combining parallel multi-tip technology,the proposed method makes it possible to fabricate large-scale graphene-based device at low cost and high efficiency.
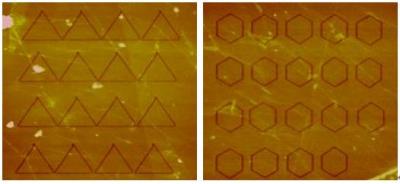
Caption: This shows graphene cutting results based on a nanorobot. Credit: ©Science China Press
Eurekalert – Graphene Cutting Results Based on a Nanorobot
Eurekalert – Graphene-control cutting using an atomic force microscope-based nanorobot
Graphene, a stable two-dimensional structure, has attracted tremendous worldwide attention in recent years because of its unique electronic, physical and mechanical properties as well as its wide range of applications. It has been proven experimentally that the electrical properties of graphene are strongly related to its size, geometry, and edge structure. Therefore, controlling graphene to desired edge structures and shapes is required for its practical application. To date, researchers have explored many graphene patterning methods, such as a catalytic cutting [1-4], SPM(Scanning Probe Microscopy)-based electric field tailoring, energy beam cutting and photocatalytic patterning techniques. The current methods can tailor graphene, however, lack of real-time sensor feedback during patterning and cutting results in an open-loop manufacturing process. This greatly limits the cutting precision of graphene and reduces the efficiency of device manufacture. Therefore, a closed-loop fabrication method using interaction forces as real-time feedback is needed to tailor graphene into desired edge structures and shapes in a controllable manner.
They investigated controlled cutting methods of graphene based on nanoscale force feedback by the introduction of robot perception, drivers and behavior coupled with an atomic force microscope. They found that the cutting forces were related to the cutting direction of the graphene lattice because of the asymmetry of the crystal structure of graphene. This discovery is expected to allow nanoscale forces to be used as real-time feedback to establish a closed-loop mechanism to cut graphene with precise control.
Atomic force microscopy is only a nanoscale observation tool, and its main shortcomings are poor location ability, lack of real-time feedback, and low efficiency. These challenges are solved by the introduction of robotics that is efficient at nanomanipulation. In this article, the relationship between lattice cutting directions and nanocutting forces were studied systematically by rotating the sample under the same cutting conditions (load, cutting velocity, tip, and effective cutting surface of the tip). The experimental results show that the cutting force is related to the lattice cutting direction: the cutting forces vary with cutting direction in the same period with a difference of up to around 209.36 nN.
This article is the first to show that cutting forces vary with lattice cutting directions, which lays an experimental foundation to build a closed-loop fabrication strategy using real-time force as a sensor feedback to control the cutting direction with lattice precision. Combined with existing parallel multi-tip technology, the technique developed in this work will make it possible to fabricate large-scale graphene-based nanodevices at low cost with high efficiency.
If you liked this article, please give it a quick review on ycombinator or StumbleUpon. Thanks

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.