
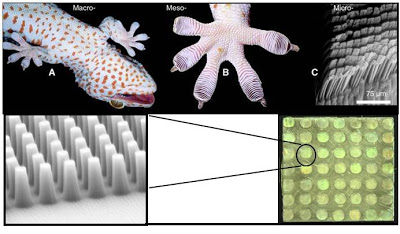
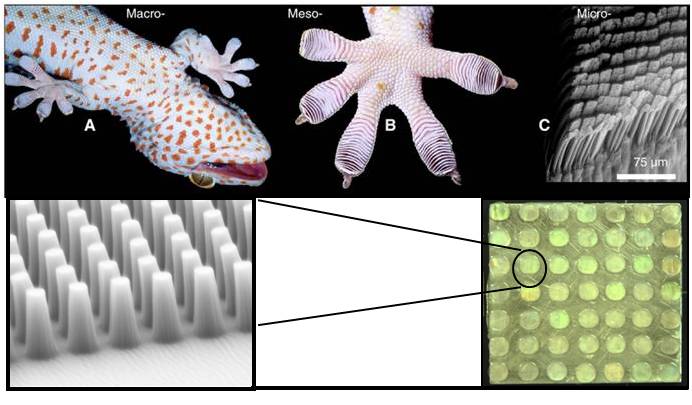
DARPA Z-man program will develop biologically inspired climbing aids to enable soldiers to scale vertical walls constructed from typical building materials, without using ropes or ladders. Geckos, spiders and small animals are the inspiration behind these climbing aids.
Nanopatents and innovations – In 2010, DARPA demonstrated a fully loaded soldier (300 lb) wearing reattachable pads (magnets and microspines) scaling a series of 25-foot walls built from mission-relevant materials using Z-Man technology.
In 2011, DARPA began the transition of Z-Man prototype technologies (magnets and microspines) to the Armed Services.
Draper is a not-for-profit research and development laboratory focused on the design, development, and deployment of advanced technological solutions for our nation’s most challenging and important problems in security, space exploration, healthcare, and energy. They have a staff of about 1400 and have been developing the Z-man project.
The microspines and magnetic switching concepts that enable strong reversible adhesion using van der Waals forces or by hooking into surface asperities. The materials and concepts were scaled up into a novel climbing aid optimized for efficient human climbing without the need for ropes or ladders. The demonstration proved the technical feasibility of an unloaded soldier to climb vertical walls of multiple surfaces constructed of typical building materials. This has never been done before and significantly outperformed the current state-of-the-art.
2010 achievements were-
– Demonstrated a fully loaded soldier (300 lb) wearing reattachable pads (magnets and microspines) scaling a series of 25-foot walls built from mission-relevant materials using Z-MAN technology.
– Demonstrated an unloaded soldier (150 lb) using reattachable pads (gecko nanoadhesives) to scale a series of 25-foot walls built from mission-relevant materials.
– 2011 transition the nanoadhesives, magnetics and microspines prototypes to the services.
Seems to fulfill the Gecko mimicing wallcrawling suits for military by 2010-2011.
See how far it gets to enthusiasts in by Dec 2012.
Daniel Harjes developed an innovative approach to use magnetic switching with negligible external energy, and in May, 2010 the team successfully demonstrated the integrated technologies and impressed DARPA, which led to the Phase III contract.
DARPA’s 2012 plans are to integrate nanoparticle enabled space propulsion technology and Z-MAN adhesion technologies for operationally relevant space applications such as orbital debris cleanup, and intelligence, surveillance, and reconnaissance (ISR). [pages 11 and 12 out of 40 pages of DARPA budget.]
Title: Reconfigurable Structures
Description: In the Reconfigurable Structures thrust, new combinations of advanced materials, devices, and structural architectures are being developed to allow military platforms to move, morph, or change shape for optimal adaptation
to changing mission requirements and unpredictable environments. This includes the demonstration of new materials and devices that will enable the military to function more effectively in the urban theater of operations. For example, a key focus is to formulate a more principled, scientific basis for robotic ground mobility and manipulation, and to develop and demonstrate from that basis innovative robot design tools, fabrication methods, and control methodologies.
FY 2010 Accomplishments: ($7 million)
– Performed laboratory testing of engineered soft material robot operations and optimized design.
– Performed laboratory demonstrations of robot function.
– Developed engineering model for soft robots, and designed prototype robots for selected applications.
– Demonstrated a fully loaded soldier (300 lb) wearing reattachable pads (magnets and microspines) scaling a series of 25-foot walls built from mission-relevant materials using Z-MAN technology.
– Demonstrated an unloaded soldier (150 lb) using reattachable pads (gecko nanoadhesives) to scale a series of 25-foot walls built from mission-relevant materials.
FY 2011 Plans: ($20 million)
– Perform laboratory demonstration of prototype soft material robots and refine designs.
– Perform simulated field testing of prototype robots.
– Finalize robot designs for field use.
– Demonstrate a fully loaded soldier (300 lb) using reattachable pads (gecko nanoadhesives) to scale a series of 25-foot walls built from mission-relevant materials.
– Transition Z-MAN prototype technologies (magnets and microspines) to the Services.
– Demonstrate components of new design tools for accelerating high quality design of robots by non-experts.
– Demonstrate proof of concept prototypes of new fabrication methods for producing robots at low cost.
– Demonstrate components of new control algorithms able to improve the mobility and manipulation performance of robots.
– Demonstrate in simulation proof of concept robots with higher mobility and manipulation performance than currently available.
– Demonstrate proof of concept components for increasing robot mobility and manipulation performance.
FY 2012 Plans: ($21 million)
– Perform field testing of prototype robots for transition to end user.
– Refine final robot designs based on field test results.
– Identify potential end users and transition to end users.
– Integrate and demonstrate components of new design tools for accelerating high quality design of robots by non-experts.
– Brass board new fabrication methods for producing robots at low cost.
– Demonstrate new control algorithms able to significantly improve mobility performance.
– Demonstrate new control algorithms able to significantly improve manipulation performance.
– Demonstrate of proof of concept robot prototypes with higher mobility.
– Integrate and demonstrate proof of concept robot prototypes with higher manipulation performance.
If you liked this article, please give it a quick review on ycombinator or StumbleUpon. Thanks

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.