

Ad Support : Nano Technology Netbook Technology News Computer Software
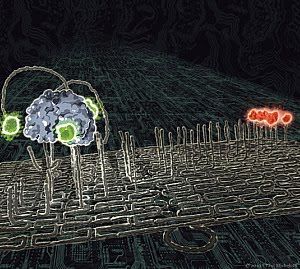
The latest installment in DNA nanotechnology has arrived: A molecular nanorobot dubbed a “spider” and labeled with green dyes traverses a substrate track built upon a DNA origami scaffold. It journeys towards its red-labeled goal by cleaving the visited substrates, thus exhibiting the characteristics of an autonomously moving, behavior-based robot at the molecular scale. [Credit: Courtesy of Paul Michelotti]
A team of scientists from Columbia University, Arizona State University, the University of Michigan, and the California Institute of Technology (Caltech) have programmed an autonomous molecular “robot” made out of DNA to start, move, turn, and stop while following a DNA track.
The development could ultimately lead to molecular systems that might one day be used for medical therapeutic devices and molecular-scale reconfigurable robots—robots made of many simple units that can reposition or even rebuild themselves to accomplish different tasks.
MIT Technology review has coverage as well
Two teams of researchers have separately made complex programmable machines using DNA molecules.
(This work and the DNA factory work led by Ned Seeman)
Nature – Molecular robots guided by prescriptive landscapes
Traditional robots rely for their function on computing, to store internal representations of their goals and environment and to coordinate sensing and any actuation of components required in response. Moving robotics to the single-molecule level is possible in principle, but requires facing the limited ability of individual molecules to store complex information and programs. One strategy to overcome this problem is to use systems that can obtain complex behaviour from the interaction of simple robots with their environment. A first step in this direction was the development of DNA walkers, which have developed from being non-autonomous to being capable of directed but brief motion on one-dimensional tracks. Here we demonstrate that previously developed random walkers—so-called molecular spiders that comprise a streptavidin molecule as an inert ‘body’ and three deoxyribozymes as catalytic ‘legs’—show elementary robotic behaviour when interacting with a precisely defined environment. Single-molecule microscopy observations confirm that such walkers achieve directional movement by sensing and modifying tracks of substrate molecules laid out on a two-dimensional DNA origami landscape. When using appropriately designed DNA origami, the molecular spiders autonomously carry out sequences of actions such as ‘start’, ‘follow’, ‘turn’ and ‘stop’. We anticipate that this strategy will result in more complex robotic behaviour at the molecular level if additional control mechanisms are incorporated. One example might be interactions between multiple molecular robots leading to collective behaviour another might be the ability to read and transform secondary cues on the DNA origami landscape as a means of implementing Turing-universal algorithmic behaviour
“We were able to create a programmed or ‘prescribed’ environment using DNA origami,” explains Yan. DNA origami, an invention by Caltech Senior Research Associate Paul W. K. Rothemund, is a type of self-assembled structure made from DNA that can be programmed to form nearly limitless shapes and patterns (such as smiley faces or maps of the Western Hemisphere or even electrical diagrams). Exploiting the sequence-recognition properties of DNA base pairing, DNA origami are created from a long single strand of DNA and a mixture of different short synthetic DNA strands that bind to and “staple” the long DNA into the desired shape. The origami used in the Nature study was a rectangle that was 2 nanometers (nm) thick and roughly 100 nm on each side.
The researchers constructed a trail of molecular “bread crumbs” on the DNA origami track by stringing additional single-stranded DNA molecules, or oligonucleotides, off the ends of the staples. These represent the cues that tell the molecular robots what to do—start, walk, turn left, turn right, or stop, for example—akin to the commands given to traditional robots. The molecular robot the researchers chose to use—dubbed a “spider”—was invented by Stojanovic several years ago, at which time it was shown to be capable of extended, but undirected, random walks on two-dimensional surfaces, eating through a field of bread crumbs.
To build the 4-nm-diameter molecular robot, the researchers started with a common protein called streptavidin, which has four symmetrically placed binding pockets for a chemical moiety called biotin. Each robot leg is a short biotin-labeled strand of DNA, “so this way we can bind up to four legs to the body of our robot,” Walter says. “It’s a four-legged spider,” quips Stojanovic. Three of the legs are made of enzymatic DNA, which is DNA that binds to and cuts a particular sequence of DNA. The spider also is outfitted with a “start strand”—the fourth leg—that tethers the spider to the start site (one particular oligonucleotide on the DNA origami track). “After the robot is released from its start site by a trigger strand, it follows the track by binding to and then cutting the DNA strands extending off of the staple strands on the molecular track,” Stojanovic explains.
“Once it cleaves,” adds Yan, “the product will dissociate, and the leg will start searching for the next substrate.” In this way, the spider is guided down the path laid out by the researchers. Finally, explains Yan, “the robot stops when it encounters a patch of DNA that it can bind to but that it cannot cut,” which acts as a sort of flypaper.
Although other DNA walkers have been developed before, they’ve never ventured farther than about three steps. “This one,” says Yan, “can walk up to about 100 nanometers. That’s roughly 50 steps.”
“This in itself wasn’t a surprise,” adds Winfree, “since Milan’s original work suggested that spiders can take hundreds if not thousands of processive steps. What’s exciting here is that not only can we directly confirm the spiders’ multistep movement, but we can direct the spiders to follow a specific path, and they do it all by themselves—autonomously.”
In fact, using atomic force microscopy and single-molecule fluorescence microscopy, the researchers were able to watch directly spiders crawling over the origami, showing that they were able to guide their molecular robots to follow four different paths.
“Monitoring this at a single molecule level is very challenging,” says Walter. “This is why we have an interdisciplinary, multi-institute operation. We have people constructing the spider, characterizing the basic spider. We have the capability to assemble the track, and analyze the system with single-molecule imaging. That’s the technical challenge.” The scientific challenges for the future, Yan says, “are how to make the spider walk faster and how to make it more programmable, so it can follow many commands on the track and make more decisions, implementing logical behavior.”
“In the current system,” says Stojanovic, “interactions are restricted to the walker and the environment. Our next step is to add a second walker, so the walkers can communicate with each other directly and via the environment. The spiders will work together to accomplish a goal.” Adds Winfree, “The key is how to learn to program higher-level behaviors through lower-level interactions.”
Such collaboration ultimately could be the basis for developing molecular-scale reconfigurable robots—complicated machines that are made of many simple units that can reorganize themselves into any shape—to accomplish different tasks, or fix themselves if they break. For example, it may be possible to use the robots for medical applications. “The idea is to have molecular robots build a structure or repair damaged tissues,” says Stojanovic.
“You could imagine the spider carrying a drug and bonding to a two-dimensional surface like a cell membrane, finding the receptors and, depending on the local environment,” adds Yan, “triggering the activation of this drug.”
Such applications, while intriguing, are decades or more away. “This may be 100 years in the future,” Stojanovic says. “We’re so far from that right now.”
“But,” Walter adds, “just as researchers self-assemble today to solve a tough problem, molecular nanorobots may do so in the future.”
The other coauthors on the paper, “Molecular robots guided by prescriptive landscapes,” are Kyle Lund and Jeanette Nangreave from Arizona State University; Anthony J. Manzo, Alexander Johnson-Buck, and Nicole Michelotti from the University of Michigan; Nadine Dabby from Caltech; and Steven Taylor and Renjun Pei from Columbia University.
If you liked this article, please give it a quick review on Reddit, or StumbleUpon. Thanks
Supporting Advertising
Business Success
How to Make Money
Executive Jobs
Paid Surveys
Thank You

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.