

The vision of claytronics (by Intel and Carnegie Mellon university) is to create programmable grit, that behaves somewhat like the liquid robot in Terminator 2 or an earlier version of utility fog.
Stress-driven MEMS Assembly + Electrostatic Forces = 1mm Diameter Robot (7 page pdf)
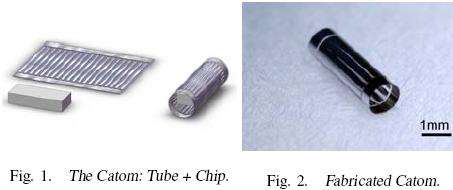
As the size of the modules in a self-reconfiguring modular robotic system shrinks and the number of modules increases, the flexibility of the system as a whole increases. In this paper, we describe the manufacturing methods and mechanisms for a 1 millimeter diameter module which can be manufactured en masse. The module is the first step towards realizing the basic unit of claytronics, a modular robotic system designed to scale to millions of units.
Successfully realizing claytronics rests firmly on the ability to mass-produce sub-millimeter scale catoms. Each catom must have a small robust physical structure integrated with the ability to transfer energy to neighboring units, store energy, move, communicate with its neighbors and selectively adhere to neighboring units; all under the local control. To invest each unit with all of this functionality requires a novel approach towards the design and manufacture of the catom. Our design philosophy seeks to simplify the catom design by following the ensemble principle, which states that: A unit should include only enough functionality to contribute to the desired functionality of the ensemble.
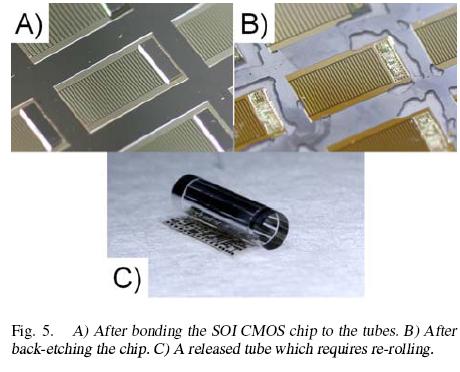
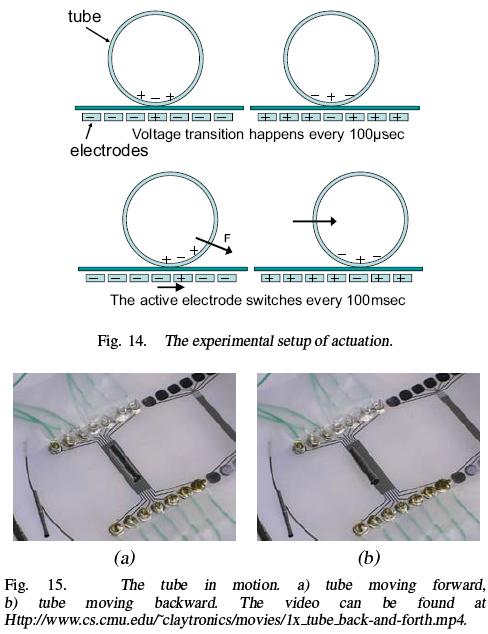
There are many steps involved in realizing a working catom. To this point we have made progress in both manufacturing and actuation. The CMOS compatible fabrication process for forming three dimensional tubes from a two dimensional process has been developed to the point where tubes with two (or more) radii can consistently be fabricated at the same time, and even on the same die. The actuation process has been modeled and simulated allowing the actuator design to be optimized. Further, the simulations give us good confidence that the catoms can provide sufficient force to operate once they are implemented, even accounting for non-uniformities such as eccentricity. Proof of principle experiments have been done to demonstrate rolling tubes using external actuation. Therefore, the next step is to integrate active control circuits that collect and store energy and then use this energy to drive the catom.
When completed, this first prototype catom will demonstrate the viability of a mass-produced mm-scale robot with internal control and the use of a single mechanism—external plates for capacitive coupling—which will be used for adhesion, actuation, and power transfer.
Scaling Claytronics to Micron Sizes

Further Reading
Publications related to claytronics
If you liked this article, please give it a quick review on Reddit, or StumbleUpon. Thanks
Supporting Advertising
Business Success
How to Make Money
Executive Jobs
Paid Surveys
Thank You

Brian Wang is a Futurist Thought Leader and a popular Science blogger with 1 million readers per month. His blog Nextbigfuture.com is ranked #1 Science News Blog. It covers many disruptive technology and trends including Space, Robotics, Artificial Intelligence, Medicine, Anti-aging Biotechnology, and Nanotechnology.
Known for identifying cutting edge technologies, he is currently a Co-Founder of a startup and fundraiser for high potential early-stage companies. He is the Head of Research for Allocations for deep technology investments and an Angel Investor at Space Angels.
A frequent speaker at corporations, he has been a TEDx speaker, a Singularity University speaker and guest at numerous interviews for radio and podcasts. He is open to public speaking and advising engagements.